

I work in the Bio-Automation lab at UC Davis. My master’s thesis incorporates state estimation, path planning, path tracking, and machine vision on an agricultural vehicle that facilitates produce transportation (see below).
State Estimation
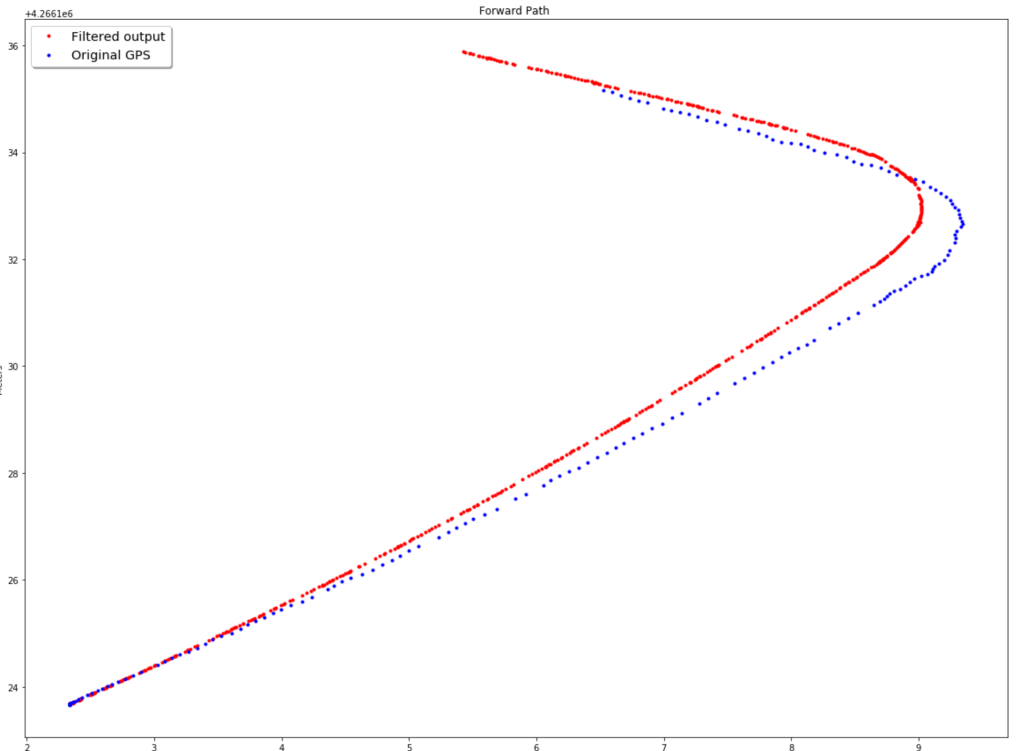
I used a probabilistic method known as an Extended Kalman Filter (EKF) to fuse 2 GPS modules, wheel odometry, and Inertial Measurement Units (IMUs).
The example below shows a path segment traversed by our robot. The blue path shows the GPS output and the red path is the “Dead Reckoning” result using only wheel odometry and IMUs that drift over time. My current solution fuses the GPS, wheel odometry, and IMUs for a state estimation that is more robust to signal occlusion and sensor noise.
Path Planning
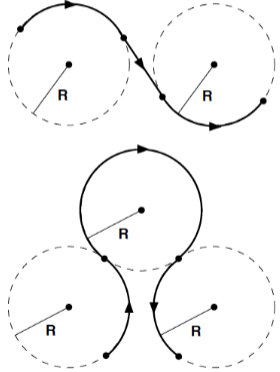
I generated an optimized vehicle trajectory using Dubins Curves. A Dubins Path uses arcs with a turning radius that matches the vehicle’s minimum turning radius. This results in an optimal path between two poses (see right).
Path Tracking
In order to traverse the generated path, I implemented a geometry-based algorithm known as pure pursuit to generate steering commands for our robot.
See the video below for a vehicle simulation I made using Robot Operating System (ROS). In this video, the red lines represent plant beds in a strawberry field, the green line is our desired path, and the blue lines are the parking locations for our robots.
